♪³ 在ros2中检查:
根据步骤来:
♪⁶ 0.安装ros2,使用鱼香ROS一键安装
bash
♪⁶ 1.创建ros2工作空间:
创建目录:
bash
编译初始化一下:
bash
这样就会在这个工作空间下自动生成build、install、log等文件夹;
♪⁶ 2.移植SolidWorks的导出的ros包并修改相关配置
将SolidWorks的导出的ros包移动到src文件夹下,即如下目录结构:
bash
因为SolidWorks导出的默认是ros1的包,因此在ros2环境下,需要修改一些配置
分别需要修改CMakeLists.txt、package.xml两个文件,以及在launch目录下,将.launch文件都改成.launch.py文件,然后创建rviz/urdf.rviz,下面进行详细说明:
(1)修改CMakeLists.txt为以下内容,其中第2行改为自己的包名:
CMake
(2)修改package.xml文件,同样,其中第3行根据自己包名修改:
xml
(3)将launch目录下的display.launch和gezebo.launch修改为display.launch.py和gezebo.launch.py,然后修改内容:
display.launch.py修改为如下内容,第11行改为自己包名,第37行改为自己的urdf文件名;
python
gezebo.launch.py修改为如下内容,第10行改为自己包名,第21行改为自己的urdf文件名;
python
(4)创建rviz/urdf.rviz,并填写一下内容:
rviz
♪⁶ 3.编译运行
然后会到工作空间目录,重新进行编译:
bash
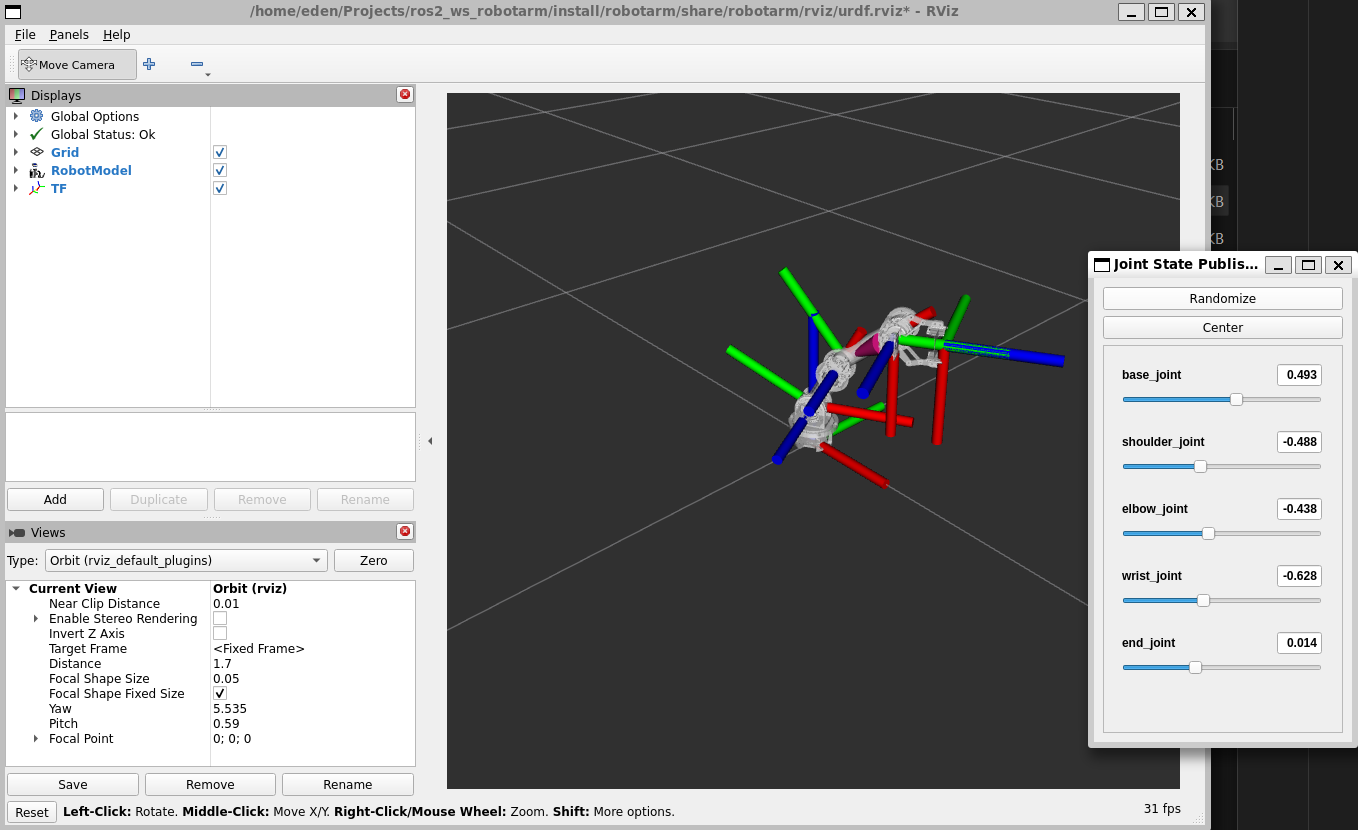
source一下环境,然后就能运行了:
bash
效果如下: